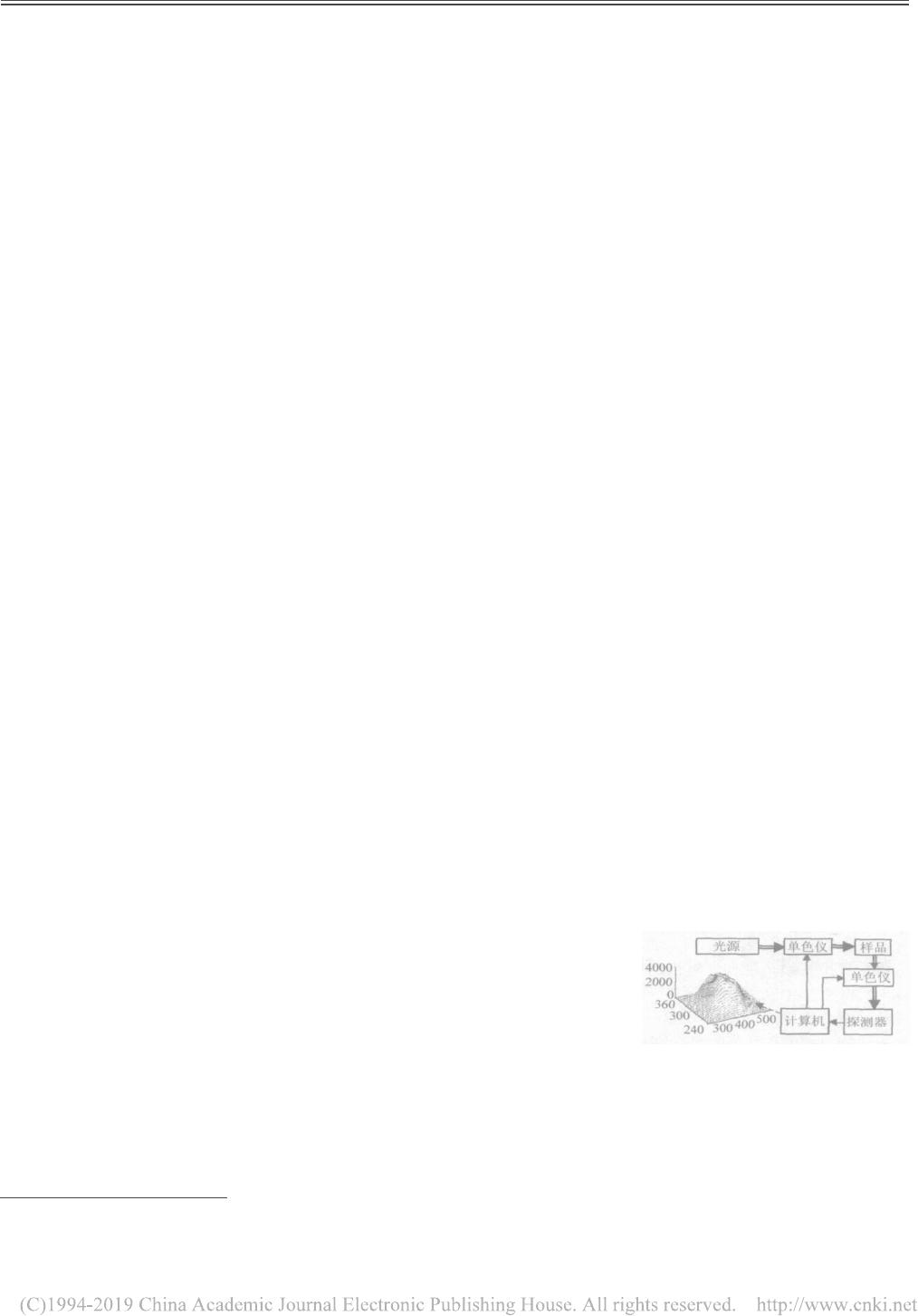
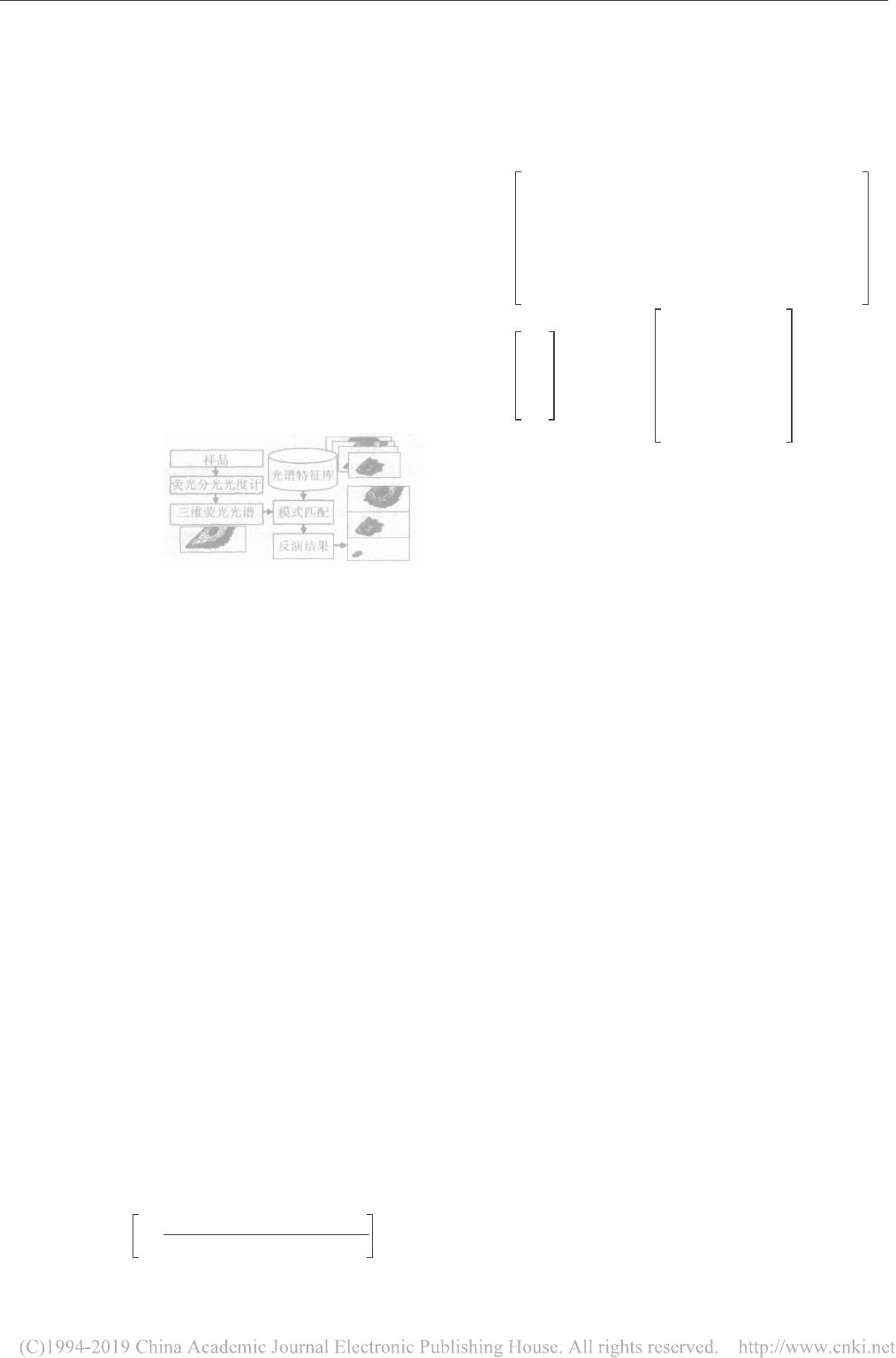
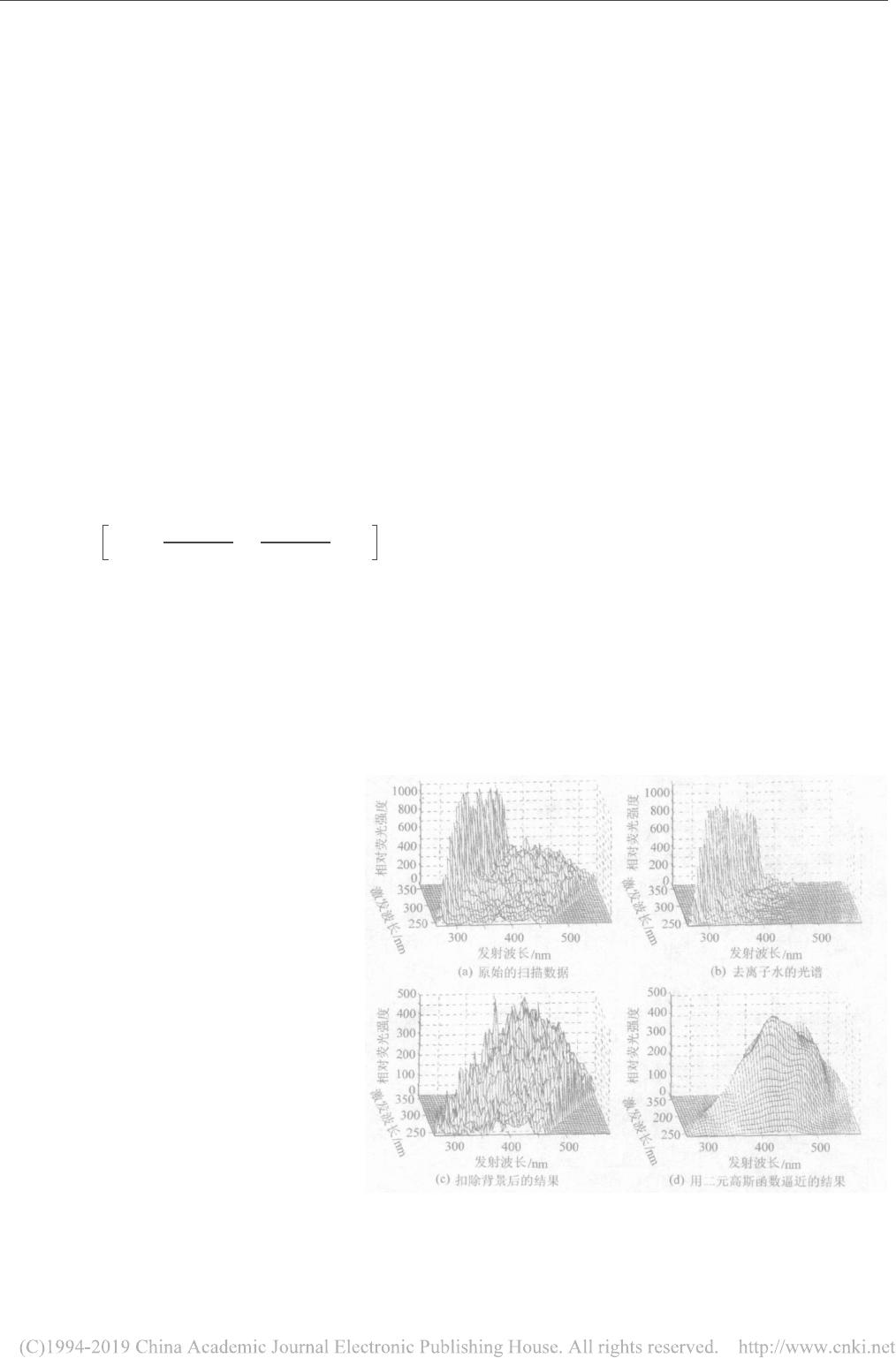
第32卷第1期2006年1月光学技术OPTICALTECHNIQUEVol.32No.1Jan.2006文章编号:1002-1582(2006)01-0027-04三维荧光光谱技术在水监测中的应用李宏斌,刘文清,张玉钧,丁志群,赵南京,陈东,刘建国(中国科学院安徽光学精密机械研究所,中国科学院环境光学与技术重点实验室,安徽合肥230031)摘要:应用荧光光谱技术分析水中污染物的含量具有灵敏度高、检测速度快等优点,三维荧光光谱技术可以提供在普通的荧光光谱中所得不到的信息,此技术可以用于多组分同时测量。讨论了如何运用三维荧光光谱技术分析水中污染物的成分,计算其含量,并给出了有效的荧光光谱特征数据库建立、多组分分析和浓度反演的数学模型。关键词:三维荧光光谱;水污染监测中图分类号:O433.54;X832文献标识码:AApplicationofthree_dimensionalfluorescencespectrumformonitoringofwaterqualityLIHong_bin,LIUWen_qing,ZHANGYu_jun,DINGZhi_qun,ZHAONan_jing,CHENDong,LIUJian_guo(AnhuiInstituteofOpticsandFineMechanics,ChineseAcademyofSciences,Hefei230031,China)Abstract:ThefluorescencetechniqueplaysanimportantroleintheenvironmentmonitoringsystemformonitoringDis-solvedOrganicMatters(DOM)inpollutedwater,whichhasadvantagesofhighsensitivity,fastdetection,remotemeasure-ment,etc.Withthetechniqueofthree_dimensionalfluorescencespectrumused,someinformationwhichcannotbeacquiredviathetechniqueofgeneralfluorescencespectrumcanbeobtained.Andthistechniquecanbeusedformulti_componentanalyzing.Somequestionsabouthowtousethetechniqueofthree_dimensionalfluorescencespectrumforanalyzingthepollutioncompo-nentsinwater,andhowtocomputetheconcentrationsofthecomponentswerediscussed.Aneffectivemathematicalmodelofcharacteristicfluorescencedatabasecreating,multi_componentanalyzing,andconcentrationscomputing,waspresented.Keywords:three_dimensionalfluorescencespectrum;monitoringofwaterquality1引言普通的荧光分析法对于复杂的多组分混合物的分析尚嫌不足,需要利用更多的光谱信息;三维荧光光谱技术恰好解决了普通荧光分析法的信息不足的问题,采用此技术得到的三维荧光特征谱,具有更好的选择性,可以用来对污染物中的多种成分更好地加以分辩。用于水污染监测的荧光分析方法中,对激光诱导荧光(LIF)技术研究的比较多,文献[1]研究了运用LIF技术对水污染物测定和鉴别。LIF具有很多独特的优点,不足之处是它的激发波长受到一定的限制,而导致所测定和鉴别的种类有限。运用荧光分光光度计获取三维荧光光谱,可以得到丰富的光谱信息,此技术可以用于分析复杂的多组分水体混合物。2三维荧光光谱技术普通的荧光光谱分为发射谱和激发谱。发射谱的荧光强度是发射波长的函数I=f(λem);激发谱的荧光强度是激发波长的函数I=f(λex)。而三维荧光光谱的强度则是激发波长和发射波长的二元函数I=f(λex,λem),这种技术的优点在于它能够获得激发波长与发射波长同时变化时的荧光强度信息,可以提供在普通的发射谱中所得不到的信息。获取三维荧光光谱的办法是采用荧光分光光度计,如图1所示。光谱采集时,先设定好激发光的波长,测定在这个激发波长下发射光谱,然后改变激发波长,测定另一个激发波长下的发射谱。这样由各个激发波长下的发射谱组合在一起就构成了一个三图1三维荧光光谱获取原理图维的荧光光谱图。普通的荧光光谱法,要么固定激发波长来测发射光谱,要么固定发射波长来测激发光谱,其得到的是一条线谱数据,它的信息量是有限的。而三维荧光光谱法则能同时获得荧光强度随激发波长和27收稿日期:2004-11-15;收到修改稿日期:2005-01-19E-mail:leehongbin@aiofm.ac.cn基金项目:中国科学院创新方向性项目资助(KGCX2_SW_111)作者简介:李宏斌(1974_),男,吉林省人,中国科学院安徽光机所博士研究生,从事光谱技术、信号处理研究。DOI:10.13741/j.cnki.11-1879/o4.2006.01.008发射波长变化的关系,对于每一种不同的荧光物质,都有其特有的三维荧光光谱特征信息,所以三维荧光光谱法具有高选择性,可用于多组分混合物的分析[2]。三维荧光光谱技术用于水中污染物的监测,具有以下优点:(1)无需化学试剂;(2)无破坏;(3)测量灵活;(4)可多组分污染物同时测量;(5)可在线测量。3三维荧光光谱分析的数学模型三维荧光光谱技术可用于多组分混合物的分析,其多组分分析的主要依据是污染物的荧光光谱特征。因为不同种类的污染物具有其特有的荧光光谱特征,利用事先建立好的各种污染物的荧光光谱特征数据库,可以在一次测量当中,辨别出各种污染物的种类并测出它们的浓度。工作原理如图2。图2多组分分析原理图在进行多组分分析前,首先建立光谱特征数据库(数据库中包含了指定种类物质的特征光谱数据),并分别对库中每种物质作浓度校准曲线;在分析待测样品时,与数据库中的特征光谱进行模式匹配,分析待测样品的成分,最后根据校准曲线计算出浓度值。3.1荧光光谱特征数据库的建立不同种类的污染物的荧光光谱特征是不同的,荧光光谱特征数据库就是把这些不同种类的物质的荧光光谱特征数据收集起来而构成的数据库。由荧光分光光度计直接测量的荧光光谱数据中既包含了这种物质的荧光特征信息,又包含了水本身的光谱信息(比如拉曼光谱),其中还夹杂着一些干扰和噪声信息,所以要建立荧光光谱特征数据库,就必须从测量到的原始数据中恢复出荧光光谱特征信息。水的拉曼光谱可以通过测纯水直接得到,作为背景直接扣除。现在要解决的问题是如何在有噪声干扰的数据中恢复出特征荧光光谱Zfeature,这就涉及到曲面拟合的问题。因为高斯函数具有良好的逼近性能,所以采用多个二元高斯函数g(x,y)来逼近Zfeature,有zfeature(x,y)=∑Lk=1wkgk(x,y)(1)gk(x,y)=exp-(x-x0k)2+(y-y0k)2r2k(2)式中zfeature(x,y)表示矩阵Zfeature中的元素;x为发射波长的坐标;y为激发波长的坐标;wk是权值;m为高斯函数的个数;(x0k,y0k)是二元高斯函数的中心;rk是半径。设有M×N个数据点,i=1,2,…,M,j=1,2,…,N,根据公式(1),则有GW=Zfeature(3)其中G=g1(x1,y1)g2(x1,y1)…gL(x1,y1)g1(x2,y1)g2(x2,y1)…gL(x2,y1)…g1(xi,yj)g2(xi,yj)…gL(xi,yj)…g1(xM,yN)g2(xM,yN)…gL(xM,yN),W=w1w2wL,Zfeature=zfeature(x1,y1)zfeature(x2,y1)zfeature(xi,yj)zfeature(xM,yN),再根据最小二乘原理[3],使e=∑Mi=1∑Mj=1[z(xi,yi)-zfeature(xi,yj)]2最小,可以计算出权值W,表达式为W=(GTG)-1GTZ(4)由此可以估计出特征荧光光谱Zfeature,Zfeature=GW=G[(GTG)-1GTZ](5)其中Z是从原始光谱中扣除水的拉曼光谱之后的结果;G是由L个高斯函数M×N个数据点的函数值所构成L×(M×N)的矩阵。那么如何确定矩阵G就是解决问题的关键所在,实际上,只要确定了高斯函数的中心和半径,就确定了矩阵G。中心和半径是本数学模型中的重要参数,中心和半径的选取决定了其性能的好坏。在XOY平面内设定一定数量的高斯函数,使其覆盖到平面的整个测量范围内,高斯函数的中心均匀分布在整个测量波长范围内,半径选取要适当,不易过小也不易过大。如果半径太大,则逼近效果不好,不能有效的恢复出特征荧光光谱,此时的拟合误差e也会很大;如果半径太小,要覆盖到平面的整个范围就要增加高斯函数的数量L才行,这样会大大增加矩阵G的维数,使得计算量急剧递增。运用上述方法分别对每种单一物质的水溶液进行测量、分析,将所得到每种物质的荧光光谱特征集合在一起就可以构建荧光光谱特征数据库了。3.2多组分分析多组分分析的主要依据是各种污染物不同的荧光光谱特征,其数学模型为Zraw=∑Ni=1biZFi+Zh2o+E(6)式中Zraw为由荧光分光光度计直接测得的结果;28光学技术第32卷图3荧光光谱特征分析Zh2o为水的光谱信息;ZFi为第i该种物质的荧光特征光谱;N代表污染物种类的数量;E为噪声。Zh2o作为背景从Zraw中扣除,得到的结果为ZZ=∑Ni=1biZFi+E(7)式中ZFi是荧光光谱特征数据库中的数据,是已知的。权值bi是预求的未知参量。由最小二乘原理可以算出bi,但bi值如果取负值就没有物理意义,所以求解此方程应采用非负最小二乘准则[4]。得到bi之后,即可算出其中的每一种污染物的荧光光谱ZiZi=biZFi(i=1,2,…,N)(8)最后,根据Zi的峰值是否超出预先设定的门限值来确定此种污染物的有无,并对污染物的浓度作定量分析。3.3浓度反演溶液的荧光强度与溶液浓度之间的关系[5]为IF=ΥFI0(1-e-kcl)=ΥFI0kcl-(-kcl)22!-(-kcl)33!-…(9)式中IF为荧光强度;ΥF是吸收光的量子与发射光的量子之比,称之为荧光效率;I0代表入射光的强度;k是物质的莫尔吸收系数;c是溶液的浓度;l是入射光在溶液中通过的光程。如果溶液的浓度很低,则公式(9)从第二项开始,后面各项可以忽略不计,此时公式(9)可以简化为IF=ΥFI0kcl=Ac(10)在溶液浓度较低时,荧光的强度与溶液浓度成正比,因此在适宜的条件下,校准曲线将是直线。但是在实际测量时,影响荧光强度的因素比较多,必须根据实际情况加以校正。对核心数据库中的每一种物质都要分别作出不同的浓度校准曲线,这样在计算各个组分的浓度时,就可以根据其校准曲线得到浓度值。配置一系列不同浓度的标准样品的溶液,分别在相同的条件下测得Z(1)raw、Z(2)raw、Z(3)raw…Z(N)raw,其对应的浓度分别为:C1、C2、C3…,CN。首先对一系列原始的测量数据进行光谱特征恢复处理,详见公式(5),得到的结果为Z(1)f、Z(2)f、Z(3)f,…,Z(N)f,最后采用多项式拟合的方法找到Z(n)f的峰值强度I(n)peak与浓度Cn间的关系,作出的曲线就是该物质的浓度校准曲线。对于某一未知成分的样品溶液,首先采用前面多组分分析的方法,得到其中可能含有成分的光谱数据Zi=biZFi,再计算其峰值强度I(n)peak,最后根据此种物质的浓度校准曲线,就可以算出它的浓度。4实验结果实验设置:激发波长设在240-360nm,激发间隔为5nm;发射波长设在265~460nm,采样间隔为5nm;计算机采集到三维荧光光谱数据,以发射波长作为x轴,激发波长作为y轴,荧光强度作为z轴,从而构成三维荧光光谱图。4.1腐殖酸溶液的实验结果腐殖酸是水中溶解有机物中具体代表性的物质,所以选用腐殖酸作为实验样品,运用三维荧光光谱技术对其进行了分析。在进行实验前,首先配置了不同浓度的腐殖酸溶液,对不同浓度溶液分别测得3组数据,第1组数据用以建立核心数据库和浓度校准之用,第2、3组数据用作测试,另外还扫描去离子水的光谱作为背景(溶剂选用的是去离子水),腐殖酸溶液浓度测量结果由表1给出。在估计特征谱时,确定矩阵G是关键的问题,选取了136个半径设为20nm高斯函数,均匀的分布在XOY平面中光谱所覆盖的区域范围内,腐殖酸溶液特征荧光光谱的分析和处理结果如图3所示。4.2多组分分析配置一系列苯酚、柴油和腐殖酸三种物质的混合溶液,它们的真实浓度和实际测量结果如表2所示,其测量结果与真实浓度接近。其中测得的柴油的浓度与实际的差别比较大,这与柴油本身荧光强度比较弱有关。29第1期李宏斌,等:三维荧光光谱技术在水监测中的应用表1腐殖酸溶液实验结果表溶液浓度/(mg/l)数据文件名称数据用途测量结果/(mg/l)44mg-1.dat浓度校准─4mg-2.dat测试4.07744mg-3.dat测试4.08093.53.5mg-1.dat浓度校准─3.5mg-2.dat测试3.59883.5mg-3.dat测试3.58382.82.8mg-1.dat浓度校准作特征谱─2.8mg-2.dat测试2.85132.8mg-3.dat测试2.81682.52.5mg-1.dat浓度校准─2.5mg-2.dat测试2.55552.5mg-3.dat测试2.488422mg-1.dat浓度校准─2mg-2.dat测试2.08432mg-3.dat测试1.99671.51.5mg-1.dat浓度校准─1.5mg-2.dat测试1.64351.5mg-3.dat测试1.542311mg-1.dat浓度校准─1mg-2.dat测试1.09981mg-3.dat测试1.15670.50.5mg-1.dat浓度校准─0.5mg-2.dat测试0.74200.5mg-3.dat测试0.6940表2多组分分析实验结果样本编号实际浓度/(mg/l)实测浓度/(mg/l)苯酚柴油腐殖酸苯酚柴油腐殖酸114100.93883.10049.8073217100.90876.49899.8732314200.87102.196419.5384417200.84205.632119.605050.57100.45306.51099.885160.57200.40645.644219.61715结论实验结果表明,运用三维荧光光谱技术可以同时测量水中的分布在可见和紫外的光谱范围的各种油类、多环芳香化合物、各种酚类化合物和所有芳香族类化合物。三维荧光光谱技术用于水污染监测,能快速地分辩出水中污染物的种类,并能较准确地计算出它们的浓度。参考文献:[1]阎吉祥,张雁,李家泽,等.水污染物的激光诱导荧光测定[J].光学技术,1999,(5):51—53.[2]陆明刚,吕小虎.分子光谱分析新法引论[M].合肥:中国科学技术大学出版社出版,1993.83.[3]张贤达.现代信号处理[M].北京:清华大学出版社,1995.11—13.[4]LawsonCL,HansonRJ.SolvingLeast-SquaresProblems[M].NewJersey:Prentice-Hall,1974.161.[5]夏锦尧.实用荧光分析法[M].北京:中国人民公安大学出版社,1991.7—8.(上接第26页)EX=ΔX′+ΔX″(25)EY=ΔY′+ΔY″(26)EZ=ΔZ′+ΔZ″(27)在测量系统固定后ΔX′、ΔY′、ΔZ′的值就确定了,对最后的测量结果只要对这几项进行修正就可以消除系统误差的影响。由于在使用系统之前要对系统进行校正,校正的目的就是要保证这三项尽可能接近零,因此这三项的值一般都很小。根据以上模型,以匹配精度为2个像素点进行了数学仿真,得到的误差结果如表1。表1误差计算结果/mm误差/m测量距离251020100X方向(中心)0.91372.38144.79079.595447.9991Y方向(中心)0.95682.39874.79949.599747.9999Z方向(中心)4.768029.9680119.9680479.96801.2000e+004X方向(边缘)2.12609.009129.195497.29051.2404e+003Y方向(边缘)4.795026.397297.2606349.45814.7501e+003Z方向(边缘)4.595526.580799.7611361.91984.9587e+003d=400mm,f=50mm,CCD像元数N=1024×1024,CCD像元尺寸W=12μm×12μm由表1可知X、Y方向的测量精度在测量区域中央的精度远高于边缘的测量精度,而Z方向的测量精度在边缘的高于中央的。因此在采用双目立体视觉进行物体距离的三维测量时,应该将被测物体的运行范围尽可能至于同一平面,而CCD至于与此平面平行,且中心相同的位置,能够达到最好的测量效果。4结论通过对双目立体视觉测量系统中的各个引起测量误差的参数进行分析,建立了双目立体视觉测量系统的测量误差模型,为利用双目立体视觉测量的设计提供理论指导。通过对误差模型进行仿真得到现在的三维测量还无法实现远距离大范围高精度测量,但是随着科技的发展特别是CCD芯片像元尺寸的变小、像元数目的增多,DSP芯片信息处理能力的增强以及匹配算法的不断完善,双目立体视觉测量将会得到更加广泛的应用。参考文献:[1]郁益银,谈恒英.工程光学[M].北京:机械工业出版社,1999.[2]朱效明,高稚允.双CCD立体视觉系统的理论研究[J].光学技术,2003,29(3):298—300.[3]管怀进,龚启荣.现代基础眼科学[M].北京:人民军医出版社,1998.[4]陈棣湘,罗飞路,潘孟春.立体视觉测量中的图像匹配策略研究[J].光学技术,2002,28(4):392—394.[5]刘章文,古天祥.利用CCD图像的灰度梯度实现物体三维测量[J].光学学报,2003,23(11):1384—1388.30光学技术第32卷
 VIP
VIP



